
Optimizing Julia code: Improving the performance of adaptive mesh refinement with p4est in Trixi.jl
In this blog post, I would like to share some experiences with writing efficient code in Julia, my favorite programming language so far. This blog post is not designed as an introduction to Julia in general or the numerical methods we use; I will also not necessarily introduce all concepts in a pedagogically optimal way. Instead, I would like to walk you through the steps I have taken when working on a concrete performance problem in Julia. In particular, we will focus on Issue #627 in Trixi.jl, a framework of high-order methods for hyperbolic conservation laws.
Trixi.jl is an open source project with several contributors. In particular, the code enabling adaptive mesh refinement using the great C library p4est in Trixi.jl was mainly written by Erik Faulhaber under the supervision of Michael Schlottke-Lakemper (and me, partially).
You should not understand this post as some form of criticism like “we need to optimize their code since it was too slow”. I prefer developing in Julia by following the two steps
- Make it work
- Make it fast
Erik Faulhaber has done a really great job at the first step. Note that this first step includes adding tests and continuous integration, so that we can refactor or rewrite code later without worrying about introducing bugs or regressions. This step is absolutely necessary for any code you want to rely on! Armed with this background, we can take the next step and improve the performance.
Step 0: Start a Julia REPL and load some packages
All results shown below are obtained using Julia v1.6.1 and command line flags
julia --threads=1 --check-bounds=no. You can find a complete set of commits
and all the code in the branch
hr/blog_p4est_performance
in my fork of Trixi.jl and the associated PR #638.
Let’s start by loading some packages.
julia> using BenchmarkHistograms, ProfileView; using Revise, Trixi
BenchmarkHistograms.jl is basically a wrapper of BenchmarkTools.jl that prints benchmark results as histograms, providing more detailed information about the performance of a piece of code. ProfileView.jl allows us to profile code and visualize the results. Finally, Revise.jl makes editing Julia packages much more comfortable by re-loading modified code on the fly. If you’re not familiar with these packages, I highly recommend taking a look at them.
Next, we run some code as described in Issue #627.
At first, we perform an adaptive mesh refinement (AMR) simulation on the TreeMesh
in Trixi.jl. The result shown below is obtained after running the command twice
to exclude compilation time. I have removed parts of the output that are not
interesting for the current task of optimizing the AMR step.
julia> trixi_include(joinpath(examples_dir(), "2d", "elixir_advection_amr.jl"))
[...]
─────────────────────────────────────────────────────────────────────────────────────
Trixi.jl Time Allocations
────────────────────── ───────────────────────
Tot / % measured: 107ms / 92.9% 15.6MiB / 99.2%
Section ncalls time %tot avg alloc %tot avg
─────────────────────────────────────────────────────────────────────────────────────
rhs! 1.60k 59.1ms 59.3% 36.9μs 586KiB 3.69% 375B
[...]
AMR 63 29.1ms 29.2% 461μs 13.2MiB 85.4% 215KiB
refine 63 18.6ms 18.7% 296μs 5.57MiB 36.0% 90.6KiB
solver 63 15.9ms 16.0% 253μs 5.06MiB 32.6% 82.2KiB
mesh 63 2.18ms 2.19% 34.6μs 459KiB 2.89% 7.28KiB
refine_unbalanced! 63 1.94ms 1.95% 30.9μs 8.59KiB 0.05% 140B
~mesh~ 63 186μs 0.19% 2.95μs 348KiB 2.20% 5.53KiB
rebalance! 63 50.9μs 0.05% 807ns 102KiB 0.64% 1.62KiB
~refine~ 63 536μs 0.54% 8.50μs 69.2KiB 0.44% 1.10KiB
coarsen 63 8.17ms 8.20% 130μs 7.14MiB 46.1% 116KiB
solver 63 4.95ms 4.96% 78.5μs 5.18MiB 33.5% 84.2KiB
mesh 63 2.48ms 2.49% 39.3μs 302KiB 1.90% 4.79KiB
~coarsen~ 63 750μs 0.75% 11.9μs 1.67MiB 10.8% 27.1KiB
indicator 63 1.83ms 1.84% 29.1μs 0.00B 0.00% 0.00B
~AMR~ 63 415μs 0.42% 6.58μs 516KiB 3.26% 8.20KiB
[...]
initial condition AMR 1 733μs 0.74% 733μs 484KiB 3.05% 484KiB
AMR 3 531μs 0.53% 177μs 484KiB 3.05% 161KiB
refine 3 458μs 0.46% 153μs 354KiB 2.23% 118KiB
mesh 2 248μs 0.25% 124μs 21.8KiB 0.14% 10.9KiB
refine_unbalanced! 2 235μs 0.24% 117μs 672B 0.00% 336B
~mesh~ 2 11.2μs 0.01% 5.61μs 16.2KiB 0.10% 8.10KiB
rebalance! 2 1.44μs 0.00% 719ns 4.94KiB 0.03% 2.47KiB
solver 2 192μs 0.19% 96.0μs 329KiB 2.07% 164KiB
~refine~ 3 18.9μs 0.02% 6.30μs 3.11KiB 0.02% 1.04KiB
indicator 3 42.1μs 0.04% 14.0μs 8.12KiB 0.05% 2.71KiB
~AMR~ 3 30.3μs 0.03% 10.1μs 121KiB 0.76% 40.4KiB
coarsen 3 260ns 0.00% 86.7ns 240B 0.00% 80.0B
~initial condition AMR~ 1 202μs 0.20% 202μs 848B 0.01% 848B
Next, we change the mesh type and use a P4estMesh by passing an additional
keyword argument to trixi_include (and run it twice to exclude compilation
time again).
julia> trixi_include(joinpath(examples_dir(), "2d", "elixir_advection_amr.jl"),
mesh=P4estMesh((1, 1), polydeg=3,
coordinates_min=coordinates_min, coordinates_max=coordinates_max,
initial_refinement_level=4))
[...]
────────────────────────────────────────────────────────────────────────────────────
Trixi.jl Time Allocations
────────────────────── ───────────────────────
Tot / % measured: 692ms / 98.6% 179MiB / 100%
Section ncalls time %tot avg alloc %tot avg
────────────────────────────────────────────────────────────────────────────────────
rhs! 1.61k 228ms 33.3% 142μs 53.5MiB 29.9% 34.1KiB
[...]
AMR 64 213ms 31.2% 3.33ms 121MiB 67.7% 1.89MiB
coarsen 64 110ms 16.2% 1.72ms 53.9MiB 30.1% 862KiB
solver 64 97.4ms 14.3% 1.52ms 52.1MiB 29.1% 833KiB
mesh 64 12.9ms 1.90% 202μs 1.81MiB 1.01% 29.0KiB
rebalance 128 11.2ms 1.64% 87.3μs 2.00KiB 0.00% 16.0B
~mesh~ 64 1.18ms 0.17% 18.4μs 1.29MiB 0.72% 20.6KiB
coarsen! 64 590μs 0.09% 9.22μs 534KiB 0.29% 8.34KiB
~coarsen~ 64 39.0μs 0.01% 609ns 1.66KiB 0.00% 26.5B
refine 64 91.8ms 13.4% 1.43ms 54.7MiB 30.6% 875KiB
solver 64 79.3ms 11.6% 1.24ms 54.2MiB 30.3% 867KiB
mesh 64 12.5ms 1.83% 195μs 515KiB 0.28% 8.05KiB
rebalance 128 11.4ms 1.67% 88.9μs 2.00KiB 0.00% 16.0B
refine 64 613μs 0.09% 9.58μs 0.00B 0.00% 0.00B
~mesh~ 64 476μs 0.07% 7.44μs 513KiB 0.28% 8.02KiB
~refine~ 64 36.6μs 0.01% 572ns 1.66KiB 0.00% 26.5B
indicator 64 10.8ms 1.58% 168μs 12.4MiB 6.96% 199KiB
~AMR~ 64 252μs 0.04% 3.94μs 2.48KiB 0.00% 39.8B
[...]
initial condition AMR 1 5.54ms 0.81% 5.54ms 2.59MiB 1.45% 2.59MiB
AMR 3 5.16ms 0.76% 1.72ms 2.59MiB 1.45% 885KiB
refine 3 4.55ms 0.67% 1.52ms 2.01MiB 1.12% 684KiB
solver 3 3.68ms 0.54% 1.23ms 1.98MiB 1.11% 676KiB
mesh 3 867μs 0.13% 289μs 24.1KiB 0.01% 8.05KiB
rebalance 6 780μs 0.11% 130μs 96.0B 0.00% 16.0B
refine 3 51.8μs 0.01% 17.3μs 0.00B 0.00% 0.00B
~mesh~ 3 35.7μs 0.01% 11.9μs 24.0KiB 0.01% 8.02KiB
~refine~ 3 3.23μs 0.00% 1.08μs 1.66KiB 0.00% 565B
indicator 3 578μs 0.08% 193μs 503KiB 0.27% 168KiB
~AMR~ 3 30.5μs 0.00% 10.2μs 98.5KiB 0.05% 32.8KiB
coarsen 3 445ns 0.00% 148ns 240B 0.00% 80.0B
~initial condition AMR~ 1 383μs 0.06% 383μs 848B 0.00% 848B
Thus, there is a performance difference of 10x for the AMR step. Erik Faulhaber
has already tracked most of this down to the call
reinitialize_containers!(mesh, equations, dg, cache).
Let’s get some baseline values for this.
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 4627; evals/sample: 1; memory estimate: 810.16 KiB; allocs estimate: 12121
ns
(970000.0 - 1.58e6] ██████████████████████████████ 4581
(1.58e6 - 2.2e6 ] 0
(2.2e6 - 2.82e6] 0
(2.82e6 - 3.43e6] 0
(3.43e6 - 4.05e6] 0
(4.05e6 - 4.66e6] 0
(4.66e6 - 5.28e6] 0
(5.28e6 - 5.9e6 ] 0
(5.9e6 - 6.51e6] 0
(6.51e6 - 7.13e6] 0
(7.13e6 - 7.74e6] 0
(7.74e6 - 8.36e6] 0
(8.36e6 - 8.97e6] ▏5
(8.97e6 - 9.59e6] ▍41
Counts
min: 968.356 μs (0.00% GC); mean: 1.078 ms (7.48% GC); median: 980.958 μs (0.00% GC); max: 9.590 ms (89.48% GC).
Step 1: Profile the expensive parts
The next step is to gather more information. Before trying to do some premature
optimizations, we need to know where most time is spend. It won’t help us if we
improve the performance of a part that only takes a few percent of the total
run time. Thus, we need to profile reinitialize_containers!.
Let’s gather some calls to this function inside a new function to avoid type instabilities at the global scope.
julia> function doit(mesh, equations, solver, cache, n)
for _ in 1:n
Trixi.reinitialize_containers!(mesh, equations, solver, cache)
end
end
doit (generic function with 1 method)
julia> @profview doit(mesh, equations, solver, semi.cache, 10^4)
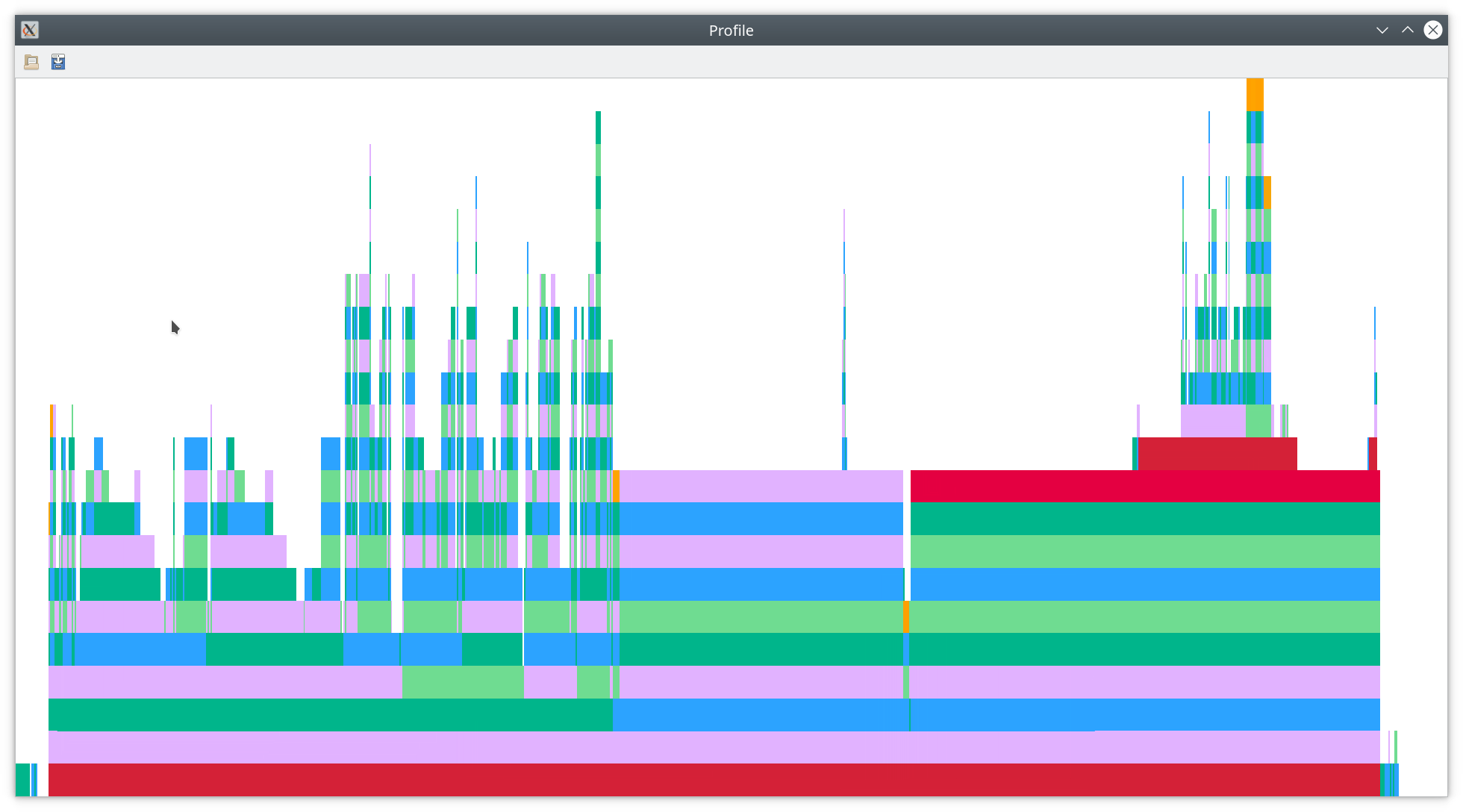
You should see something like the following flamegraph.
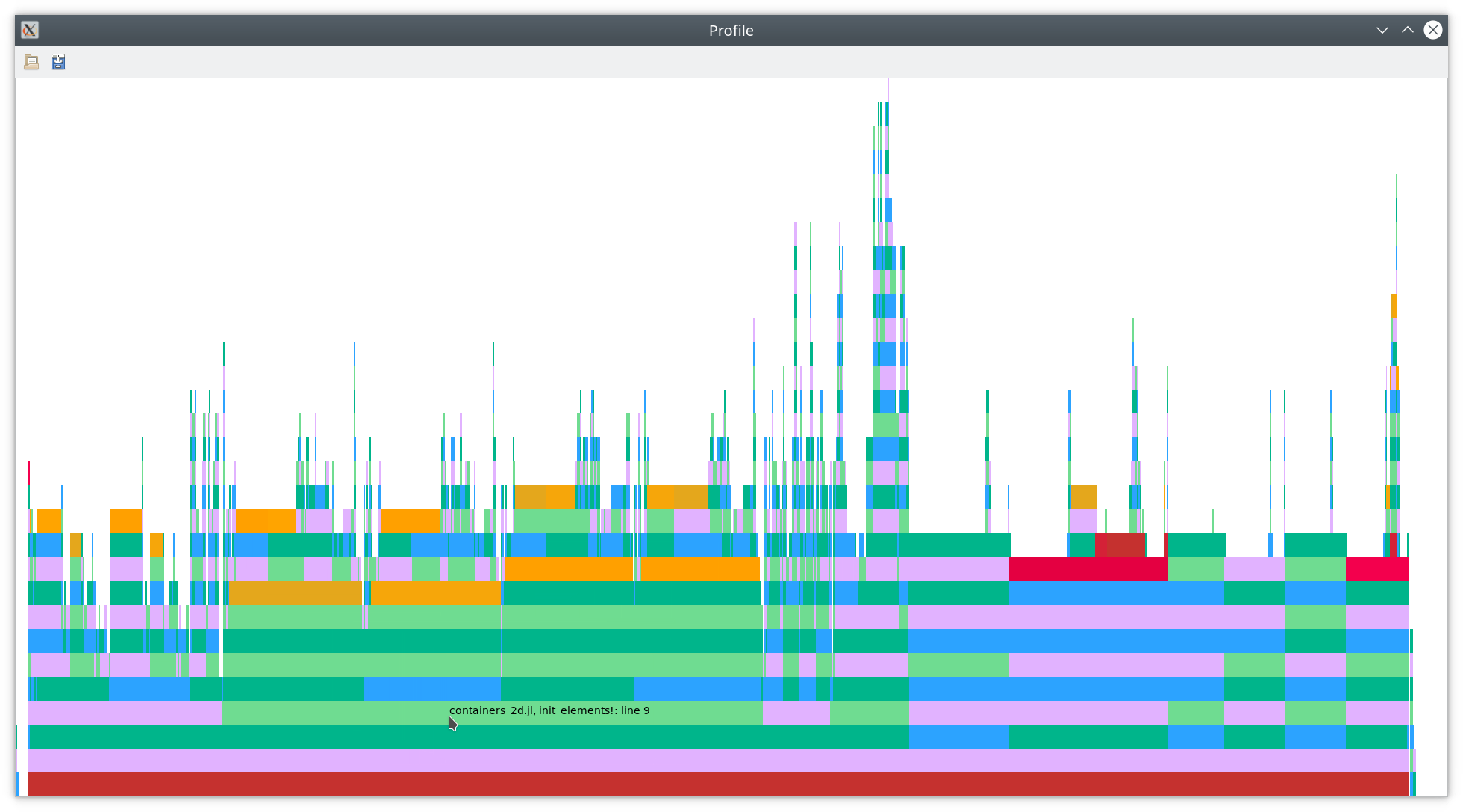
As you can see there, most of the time is spend in line 9 of init_elements!
(near the mouse cursor), which is reproduced below.
# Initialize data structures in element container
function init_elements!(elements, mesh::P4estMesh{2}, basis::LobattoLegendreBasis)
@unpack node_coordinates, jacobian_matrix,
contravariant_vectors, inverse_jacobian = elements
calc_node_coordinates!(node_coordinates, mesh, basis.nodes)
for element in 1:ncells(mesh)
calc_jacobian_matrix!(jacobian_matrix, element, node_coordinates, basis)
calc_contravariant_vectors!(contravariant_vectors, element, jacobian_matrix)
calc_inverse_jacobian!(inverse_jacobian, element, jacobian_matrix)
end
return nothing
end
Line 9 is calc_jacobian_matrix!(jacobian_matrix, element, node_coordinates, basis).
You can open this line in your favorite editor of choice
(set via ENV["JULIA_EDITOR"], e.g. code for Visual Studio Code with the
Julia extension in my setup)
by right-clicking on the bar in the flamegraph.
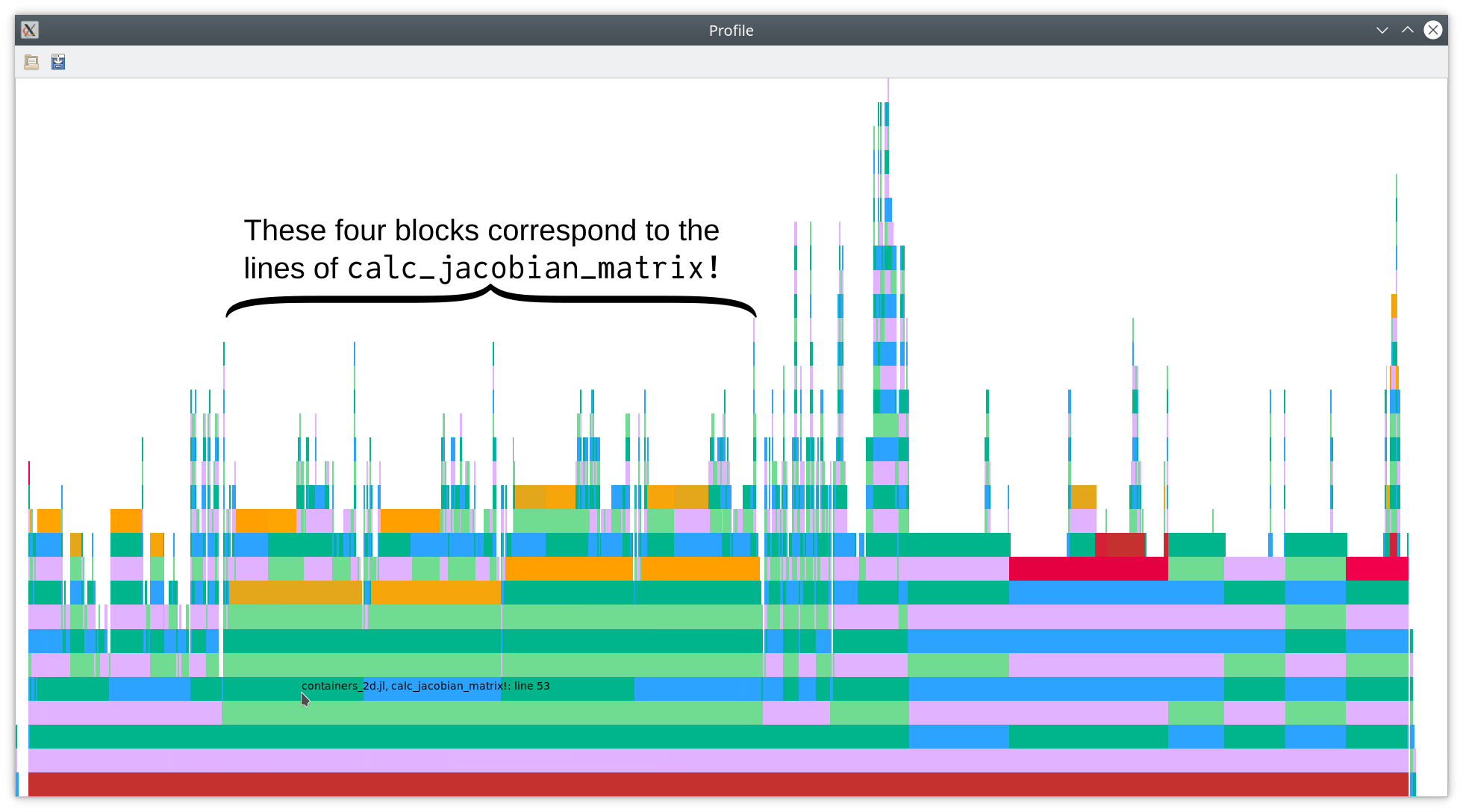
As you can see in this flamegraph, each of the four lines of
function calc_jacobian_matrix!(jacobian_matrix, element, node_coordinates::AbstractArray{<:Any, 4}, basis::LobattoLegendreBasis)
@views mul!(jacobian_matrix[1, 1, :, :, element], basis.derivative_matrix, node_coordinates[1, :, :, element]) # x_ξ
@views mul!(jacobian_matrix[2, 1, :, :, element], basis.derivative_matrix, node_coordinates[2, :, :, element]) # y_ξ
@views mul!(jacobian_matrix[1, 2, :, :, element], node_coordinates[1, :, :, element], basis.derivative_matrix') # x_η
@views mul!(jacobian_matrix[2, 2, :, :, element], node_coordinates[2, :, :, element], basis.derivative_matrix') # y_η
return jacobian_matrix
end
takes quite some time. By climbing up the call chain, it becomes obvious that
these calls to mul! end up in some generic linear algebra code of Julia
(because of the views) that doesn’t really seem to be optimized a lot. We might
improve the performance by reformulating this such that BLAS libraries can
used. However, the sizes of the matrices are relatively small and OpenBLAS
(shipped with Julia) is not really very efficient for such small matrices.
We could try to swap OpenBLAS and use Intel MKL or something similar, but
we can also do much better and use pure Julia code: It’s time for
LoopVectorization.jl.
Before we optimize this part, let’s get some baseline values again.
julia> @benchmark Trixi.calc_jacobian_matrix!(
$(semi.cache.elements.jacobian_matrix),
$(1),
$(semi.cache.elements.node_coordinates),
$(solver.basis))
samples: 10000; evals/sample: 164; memory estimate: 896 bytes; allocs estimate: 16
ns
(700.0 - 4000.0 ] ██████████████████████████████ 9983
(4000.0 - 7400.0 ] 0
(7400.0 - 10800.0] 0
(10800.0 - 14200.0] 0
(14200.0 - 17600.0] 0
(17600.0 - 21000.0] 0
(21000.0 - 24400.0] 0
(24400.0 - 27800.0] 0
(27800.0 - 31200.0] 0
(31200.0 - 34600.0] 0
(34600.0 - 38000.0] 0
(38000.0 - 41400.0] 0
(41400.0 - 44800.0] 0
(44800.0 - 48200.0] ▏2
(48200.0 - 51600.0] ▏15
Counts
min: 650.817 ns (0.00% GC); mean: 762.658 ns (10.76% GC); median: 662.390 ns (0.00% GC); max: 51.557 μs (98.45% GC).
Let’s re-write the matrix multiplications using explicit loops and performance annotations from LoopVectorization.jl.
# Calculate Jacobian matrix of the mapping from the reference element to the element in the physical domain
function calc_jacobian_matrix!(jacobian_matrix, element, node_coordinates::AbstractArray{<:Any, 4}, basis::LobattoLegendreBasis)
@unpack derivative_matrix = basis
# The code below is equivalent to the following matrix multiplications, which
# seem to end up calling generic linear algebra code from Julia. Thus, the
# optimized code below using `@turbo` is much faster.
# @views mul!(jacobian_matrix[1, 1, :, :, element], derivative_matrix, node_coordinates[1, :, :, element]) # x_ξ
# @views mul!(jacobian_matrix[2, 1, :, :, element], derivative_matrix, node_coordinates[2, :, :, element]) # y_ξ
# @views mul!(jacobian_matrix[1, 2, :, :, element], node_coordinates[1, :, :, element], derivative_matrix') # x_η
# @views mul!(jacobian_matrix[2, 2, :, :, element], node_coordinates[2, :, :, element], derivative_matrix') # y_η
# x_ξ, y_ξ
@turbo for xy in indices((jacobian_matrix, node_coordinates), (1, 1))
for j in indices((jacobian_matrix, node_coordinates), (4, 3)), i in indices((jacobian_matrix, derivative_matrix), (3, 1))
res = zero(eltype(jacobian_matrix))
for ii in indices((node_coordinates, derivative_matrix), (2, 2))
res += derivative_matrix[i, ii] * node_coordinates[xy, ii, j, element]
end
jacobian_matrix[xy, 1, i, j, element] = res
end
end
# x_η, y_η
@turbo for xy in indices((jacobian_matrix, node_coordinates), (1, 1))
for j in indices((jacobian_matrix, derivative_matrix), (4, 1)), i in indices((jacobian_matrix, node_coordinates), (3, 2))
res = zero(eltype(jacobian_matrix))
for jj in indices((node_coordinates, derivative_matrix), (3, 2))
res += derivative_matrix[j, jj] * node_coordinates[xy, i, jj, element]
end
jacobian_matrix[xy, 2, i, j, element] = res
end
end
return jacobian_matrix
end
On top of writing out the loops explicitly, we used two techniques to get full speed.
-
@turbofrom LoopVectorization.jl transforms the loops and tries to generate efficient compiled code using SIMD instructions. -
indices((jacobian_matrix, node_coordinates), (1, 1))tells LoopVectorization.jl that the sizes of the first dimensions ofjacobian_matrixandnode_coordinatesare the same and that we iterate over the full first dimension. That’s more information than available from something likeaxes(jacobian_matrix, 1), so it allows LoopVectorization.jl to take advantage of it and generate better code.
Let’s have a look at the resulting performance.
julia> @benchmark Trixi.calc_jacobian_matrix!(
$(semi.cache.elements.jacobian_matrix),
$(1),
$(semi.cache.elements.node_coordinates),
$(solver.basis))
samples: 10000; evals/sample: 987; memory estimate: 0 bytes; allocs estimate: 0
ns
(49.9 - 53.6 ] ██████████████████████████████ 9800
(53.6 - 57.4 ] ▏10
(57.4 - 61.1 ] ▏2
(61.1 - 64.9 ] ▎51
(64.9 - 68.6 ] ▎47
(68.6 - 72.3 ] ▏4
(72.3 - 76.1 ] ▏1
(76.1 - 79.8 ] ▎44
(79.8 - 83.6 ] ▏16
(83.6 - 87.3 ] ▏4
(87.3 - 91.1 ] ▏3
(91.1 - 94.8 ] ▏3
(94.8 - 98.6 ] ▏4
(98.6 - 102.3] ▏1
(102.3 - 115.8] ▏10
Counts
min: 49.875 ns (0.00% GC); mean: 50.854 ns (0.00% GC); median: 50.369 ns (0.00% GC); max: 115.848 ns (0.00% GC).
That’s an impressive speed-up from ca. 700 nanoseconds to ca. 50 nanoseconds per
element! Since we optimized a part that took a relatively large amount of the
total run time, we also get a decent speed-up of reinitialize_containers!.
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 6735; evals/sample: 1; memory estimate: 418.16 KiB; allocs estimate: 4953
ns
(690000.0 - 1.22e6] ██████████████████████████████ 6702
(1.22e6 - 1.75e6] ▏1
(1.75e6 - 2.28e6] 0
(2.28e6 - 2.81e6] 0
(2.81e6 - 3.34e6] 0
(3.34e6 - 3.87e6] 0
(3.87e6 - 4.4e6 ] 0
(4.4e6 - 4.94e6] 0
(4.94e6 - 5.47e6] 0
(5.47e6 - 6.0e6 ] 0
(6.0e6 - 6.53e6] 0
(6.53e6 - 7.06e6] 0
(7.06e6 - 7.59e6] ▏6
(7.59e6 - 8.12e6] ▏26
Counts
min: 688.565 μs (0.00% GC); mean: 739.861 μs (4.46% GC); median: 694.888 μs (0.00% GC); max: 8.120 ms (90.25% GC).
The runtime of this part is reduced by ca. 25%.
Step 2: Attack the next major performance impact
Let’s repeat the profiling to find our next goal for further optimizations.
julia> @profview doit(mesh, equations, solver, semi.cache, 10^4)
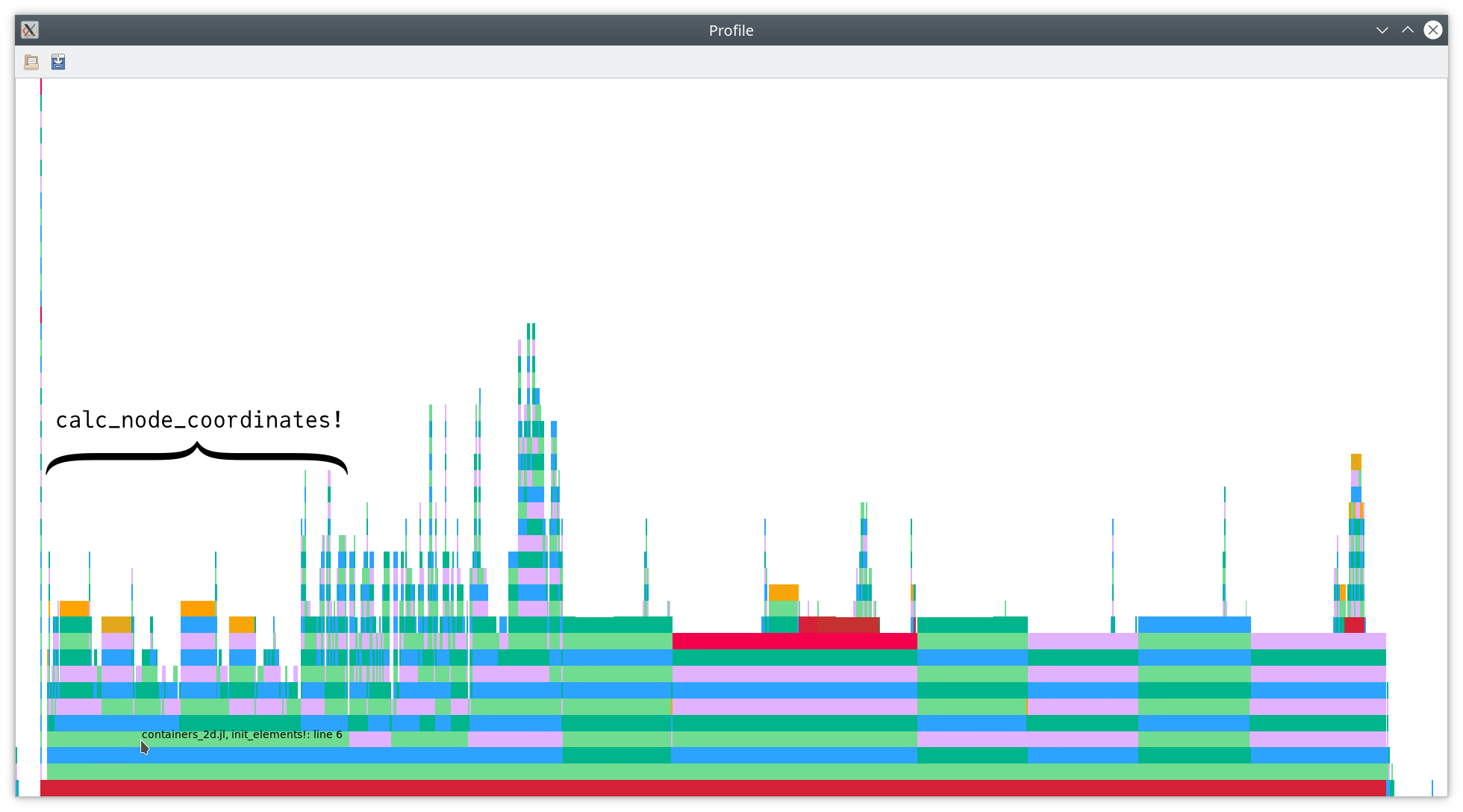
As you can see above, the next big block is
calc_node_coordinates!(node_coordinates, mesh, basis.nodes). Let’s get some
baseline values.
julia> @benchmark Trixi.calc_node_coordinates!(
$(semi.cache.elements.node_coordinates),
$(mesh),
$(solver.basis.nodes))
samples: 10000; evals/sample: 1; memory estimate: 284.05 KiB; allocs estimate: 1795
ns
(130000.0 - 560000.0] ██████████████████████████████▏9967
(560000.0 - 1.0e6 ] 0
(1.0e6 - 1.44e6 ] 0
(1.44e6 - 1.88e6 ] 0
(1.88e6 - 2.32e6 ] 0
(2.32e6 - 2.75e6 ] 0
(2.75e6 - 3.19e6 ] 0
(3.19e6 - 3.63e6 ] 0
(3.63e6 - 4.07e6 ] 0
(4.07e6 - 4.51e6 ] 0
(4.51e6 - 4.94e6 ] 0
(4.94e6 - 5.38e6 ] 0
(5.38e6 - 5.82e6 ] 0
(5.82e6 - 6.26e6 ] ▏23
(6.26e6 - 8.23e6 ] ▏10
Counts
min: 126.054 μs (0.00% GC); mean: 173.450 μs (11.67% GC); median: 130.181 μs (0.00% GC); max: 8.228 ms (97.68% GC).
To improve the performance, let’s dig deeper in the flamegraph.
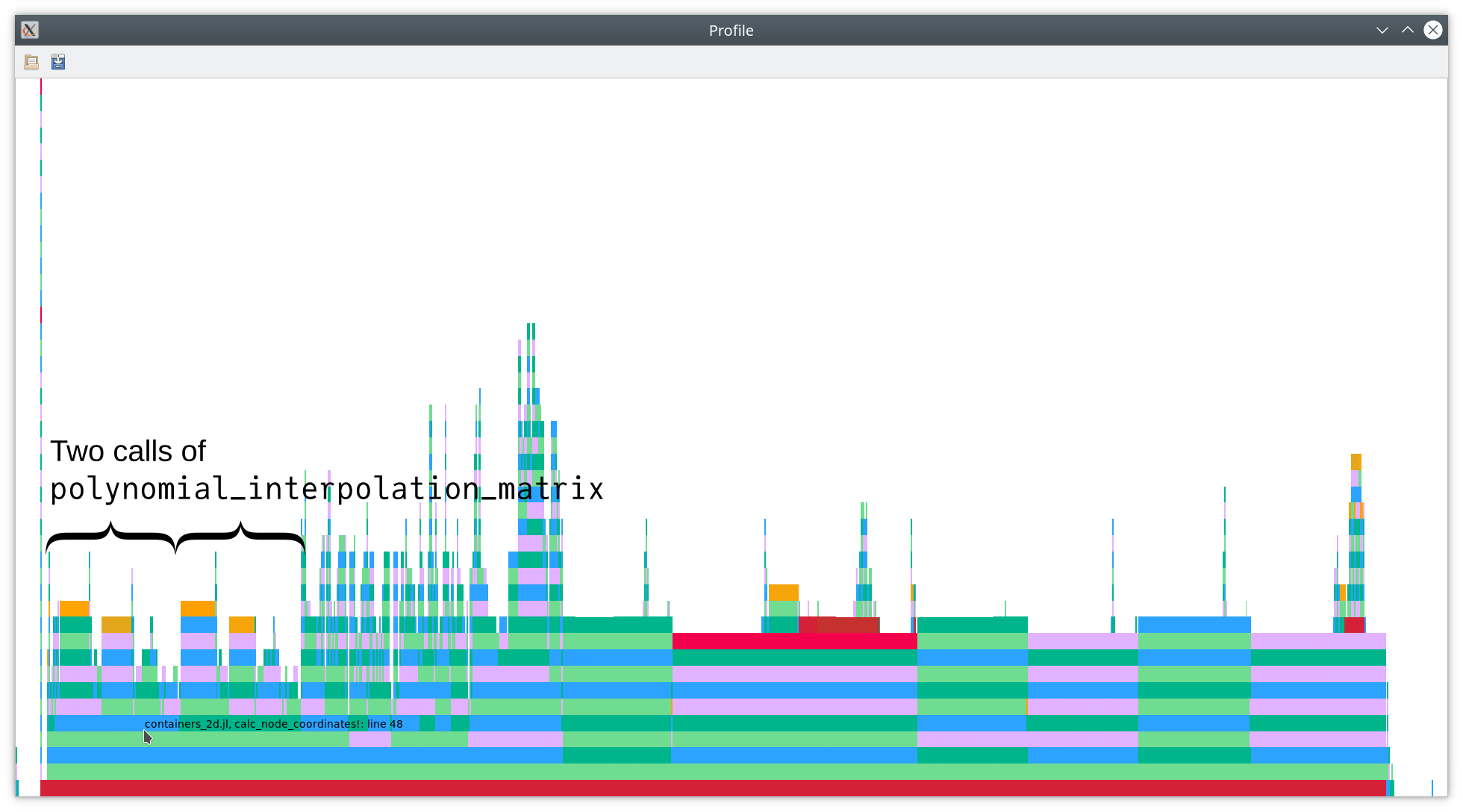
Most of the time here is spent in the two lines
matrix1 = polynomial_interpolation_matrix(mesh.nodes, nodes_out_x)
matrix2 = polynomial_interpolation_matrix(mesh.nodes, nodes_out_y)
Let’s see what’s going on:
# Calculate and interpolation matrix (Vandermonde matrix) between two given sets of nodes
function polynomial_interpolation_matrix(nodes_in, nodes_out)
n_nodes_in = length(nodes_in)
n_nodes_out = length(nodes_out)
wbary_in = barycentric_weights(nodes_in)
vdm = zeros(n_nodes_out, n_nodes_in)
for k in 1:n_nodes_out
match = false
for j in 1:n_nodes_in
if isapprox(nodes_out[k], nodes_in[j], rtol=eps())
match = true
vdm[k, j] = 1
end
end
if match == false
s = 0.0
for j in 1:n_nodes_in
t = wbary_in[j] / (nodes_out[k] - nodes_in[j])
vdm[k, j] = t
s += t
end
for j in 1:n_nodes_in
vdm[k, j] = vdm[k, j] / s
end
end
end
return vdm
end
Clearly, there will be a lot of repeated allocations if we use this method as it is. To be fair, this method was written in the very early days of Trixi. Back in these days, it was only used at the very beginning when initializing the DGSEM solver and necessary interpolation matrices. Hence, it was never critical for performance at that time. Now, it has become a bottleneck and needs to be improved.
Let’s implement the core logic without allocations in another function.
# Calculate and interpolation matrix (Vandermonde matrix) between two given sets of nodes
function polynomial_interpolation_matrix(nodes_in, nodes_out,
baryweights_in=barycentric_weights(nodes_in))
n_nodes_in = length(nodes_in)
n_nodes_out = length(nodes_out)
vandermonde = Matrix{promote_type(eltype(nodes_in), eltype(nodes_out))}(undef,
n_nodes_out, n_nodes_in)
polynomial_interpolation_matrix!(vandermonde, nodes_in, nodes_out, baryweights_in)
return vandermonde
end
function polynomial_interpolation_matrix!(vandermonde,
nodes_in, nodes_out,
baryweights_in)
fill!(vandermonde, zero(eltype(vandermonde)))
for k in eachindex(nodes_out)
match = false
for j in eachindex(nodes_in)
if isapprox(nodes_out[k], nodes_in[j])
match = true
vandermonde[k, j] = 1
end
end
if match == false
s = zero(eltype(vandermonde))
for j in eachindex(nodes_in)
t = baryweights_in[j] / (nodes_out[k] - nodes_in[j])
vandermonde[k, j] = t
s += t
end
for j in eachindex(nodes_in)
vandermonde[k, j] = vandermonde[k, j] / s
end
end
end
return vandermonde
end
This approach is good practice in Julia: Write efficient in-place versions without allocations and easy-to-use allocating versions additionally.
If we move the allocations
baryweights_in = barycentric_weights(mesh.nodes)
matrix1 = Matrix{real(mesh)}(undef, length(nodes), length(mesh.nodes))
matrix2 = similar(matrix1)
to calc_node_coordinates! and use the in-place versions
polynomial_interpolation_matrix!(matrix1, mesh.nodes, nodes_out_x, baryweights_in)
polynomial_interpolation_matrix!(matrix2, mesh.nodes, nodes_out_y, baryweights_in)
in the loop, we get the following results.
julia> @benchmark Trixi.calc_node_coordinates!(
$(semi.cache.elements.node_coordinates),
$(mesh),
$(solver.basis.nodes))
samples: 10000; evals/sample: 1; memory estimate: 4.56 KiB; allocs estimate: 6
ns
(101400.0 - 106600.0] ██████████████████████████████ 9562
(106600.0 - 111800.0] ▍82
(111800.0 - 117000.0] ▍81
(117000.0 - 122200.0] ▏36
(122200.0 - 127400.0] ▏4
(127400.0 - 132600.0] ▌135
(132600.0 - 137800.0] ▏20
(137800.0 - 143000.0] ▏3
(143000.0 - 148200.0] ▏23
(148200.0 - 153400.0] ▏10
(153400.0 - 158600.0] ▏13
(158600.0 - 163800.0] ▏15
(163800.0 - 169000.0] ▏2
(169000.0 - 174200.0] ▏4
(174200.0 - 346600.0] ▏10
Counts
min: 101.423 μs (0.00% GC); mean: 103.452 μs (0.00% GC); median: 102.124 μs (0.00% GC); max: 346.622 μs (0.00% GC).
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 7159; evals/sample: 1; memory estimate: 138.67 KiB; allocs estimate: 3164
ns
(700000.0 - 1.4e6 ] ██████████████████████████████7148
(1.4e6 - 2.2e6 ] 0
(2.2e6 - 3.0e6 ] 0
(3.0e6 - 3.8e6 ] 0
(3.8e6 - 4.6e6 ] 0
(4.6e6 - 5.4e6 ] 0
(5.4e6 - 6.2e6 ] 0
(6.2e6 - 6.9e6 ] 0
(6.9e6 - 7.7e6 ] 0
(7.7e6 - 8.5e6 ] 0
(8.5e6 - 9.3e6 ] 0
(9.3e6 - 1.01e7] 0
(1.01e7 - 1.09e7] 0
(1.09e7 - 1.16e7] ▏11
Counts
min: 664.983 μs (0.00% GC); mean: 695.805 μs (2.38% GC); median: 669.974 μs (0.00% GC); max: 11.649 ms (93.42% GC).
Thus, pre-allocating some storage reduced the runtime of calc_node_coordinates!
by ca. 25%, gaining ca. 5% better performance of reinitialize_containers!.
Step 3: Another step towards improved performance
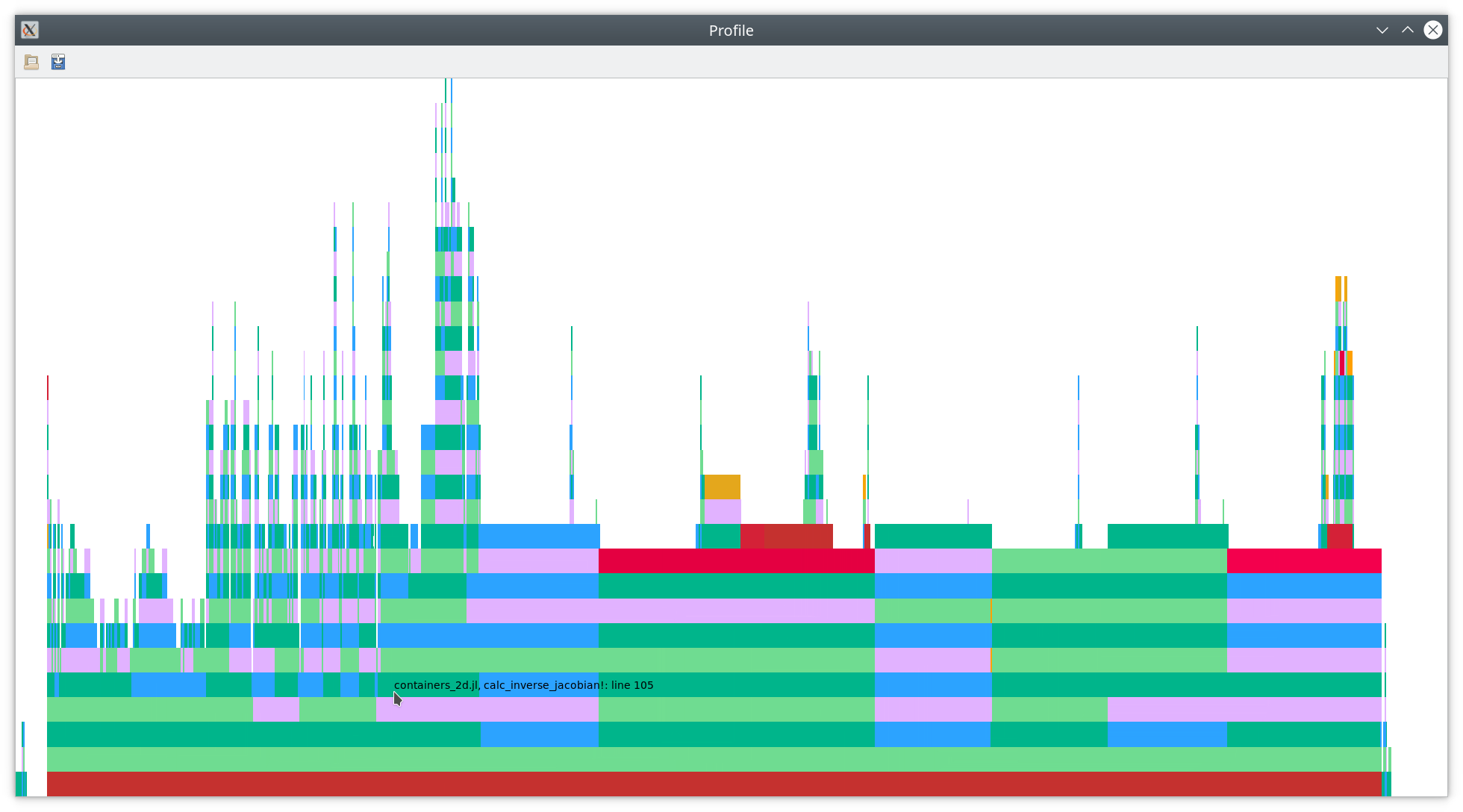
There is still some room for further improvements. Looking at the new flamegraph
below, we see that the next reasonable target of our optimizations is
calc_inverse_jacobian!(inverse_jacobian, element, jacobian_matrix) in
init_elements!, which is reproduced below for convenience.
# Calculate inverse Jacobian (determinant of Jacobian matrix of the mapping) in each node
function calc_inverse_jacobian!(inverse_jacobian::AbstractArray{<:Any,3}, element, jacobian_matrix)
@. @views inverse_jacobian[:, :, element] = inv(jacobian_matrix[1, 1, :, :, element] * jacobian_matrix[2, 2, :, :, element] -
jacobian_matrix[1, 2, :, :, element] * jacobian_matrix[2, 1, :, :, element])
return inverse_jacobian
end
The baseline timing is
julia> @benchmark Trixi.calc_inverse_jacobian!(
$(semi.cache.elements.inverse_jacobian),
$(1),
$(semi.cache.elements.jacobian_matrix))
samples: 10000; evals/sample: 935; memory estimate: 0 bytes; allocs estimate: 0
ns
(106.0 - 119.0] ██████████████████████████████ 8277
(119.0 - 131.0] █▋448
(131.0 - 143.0] █▏306
(143.0 - 155.0] █248
(155.0 - 168.0] ▊200
(168.0 - 180.0] ▊184
(180.0 - 192.0] ▌121
(192.0 - 204.0] ▍90
(204.0 - 217.0] ▏31
(217.0 - 229.0] ▏23
(229.0 - 241.0] ▏24
(241.0 - 253.0] ▏16
(253.0 - 266.0] ▏14
(266.0 - 278.0] ▏8
(278.0 - 321.0] ▏10
Counts
min: 106.279 ns (0.00% GC); mean: 117.476 ns (0.00% GC); median: 109.401 ns (0.00% GC); max: 321.129 ns (0.00% GC).
Throwing in some performance optimizations using LoopVectorization.jl, we end up with the code
# Calculate inverse Jacobian (determinant of Jacobian matrix of the mapping) in each node
function calc_inverse_jacobian!(inverse_jacobian::AbstractArray{<:Any,3}, element, jacobian_matrix)
# The code below is equivalent to the following high-level code but much faster.
# @. @views inverse_jacobian[:, :, element] = inv(jacobian_matrix[1, 1, :, :, element] * jacobian_matrix[2, 2, :, :, element] -
# jacobian_matrix[1, 2, :, :, element] * jacobian_matrix[2, 1, :, :, element])
@turbo for j in indices((inverse_jacobian, jacobian_matrix), (2, 4)),
i in indices((inverse_jacobian, jacobian_matrix), (1, 3))
inverse_jacobian[i, j, element] = inv(jacobian_matrix[1, 1, i, j, element] * jacobian_matrix[2, 2, i, j, element] -
jacobian_matrix[1, 2, i, j, element] * jacobian_matrix[2, 1, i, j, element])
end
return inverse_jacobian
end
and the benchmark results
julia> @benchmark Trixi.calc_inverse_jacobian!(
$(semi.cache.elements.inverse_jacobian),
$(1),
$(semi.cache.elements.jacobian_matrix))
samples: 10000; evals/sample: 999; memory estimate: 0 bytes; allocs estimate: 0
ns
(12.7 - 13.8] ██████████████████████████████ 9905
(13.8 - 15.0] ▏25
(15.0 - 16.1] ▏11
(16.1 - 17.2] 0
(17.2 - 18.3] 0
(18.3 - 19.4] 0
(19.4 - 20.5] ▏1
(20.5 - 21.6] 0
(21.6 - 22.7] 0
(22.7 - 23.8] 0
(23.8 - 24.9] 0
(24.9 - 26.0] ▏19
(26.0 - 27.1] ▏10
(27.1 - 28.2] ▏19
(28.2 - 38.7] ▏10
Counts
min: 12.740 ns (0.00% GC); mean: 12.847 ns (0.00% GC); median: 12.754 ns (0.00% GC); max: 38.741 ns (0.00% GC).
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 7647; evals/sample: 1; memory estimate: 138.67 KiB; allocs estimate: 3164
ns
(600000.0 - 1.4e6 ] ██████████████████████████████7635
(1.4e6 - 2.3e6 ] 0
(2.3e6 - 3.1e6 ] 0
(3.1e6 - 3.9e6 ] 0
(3.9e6 - 4.7e6 ] 0
(4.7e6 - 5.5e6 ] 0
(5.5e6 - 6.3e6 ] 0
(6.3e6 - 7.1e6 ] 0
(7.1e6 - 8.0e6 ] 0
(8.0e6 - 8.8e6 ] 0
(8.8e6 - 9.6e6 ] 0
(9.6e6 - 1.04e7] 0
(1.04e7 - 1.12e7] 0
(1.12e7 - 1.2e7 ] ▏12
Counts
min: 621.222 μs (0.00% GC); mean: 651.399 μs (2.66% GC); median: 626.502 μs (0.00% GC); max: 12.040 ms (93.98% GC).
The gain from these single performance improvements becomes smaller since our
targets contribute less to the overall runtime. Here, we gained ca. 7 percent
improvement for reinitialize_containers!.
By the way, I discovered a bug in LoopVectorization.jl while performing a quick smoke test after this change. Chris Elrod, the author of LoopVectorization.jl fixed this very quickly after reporting it - great support, as always!
Step 4: Iterating further
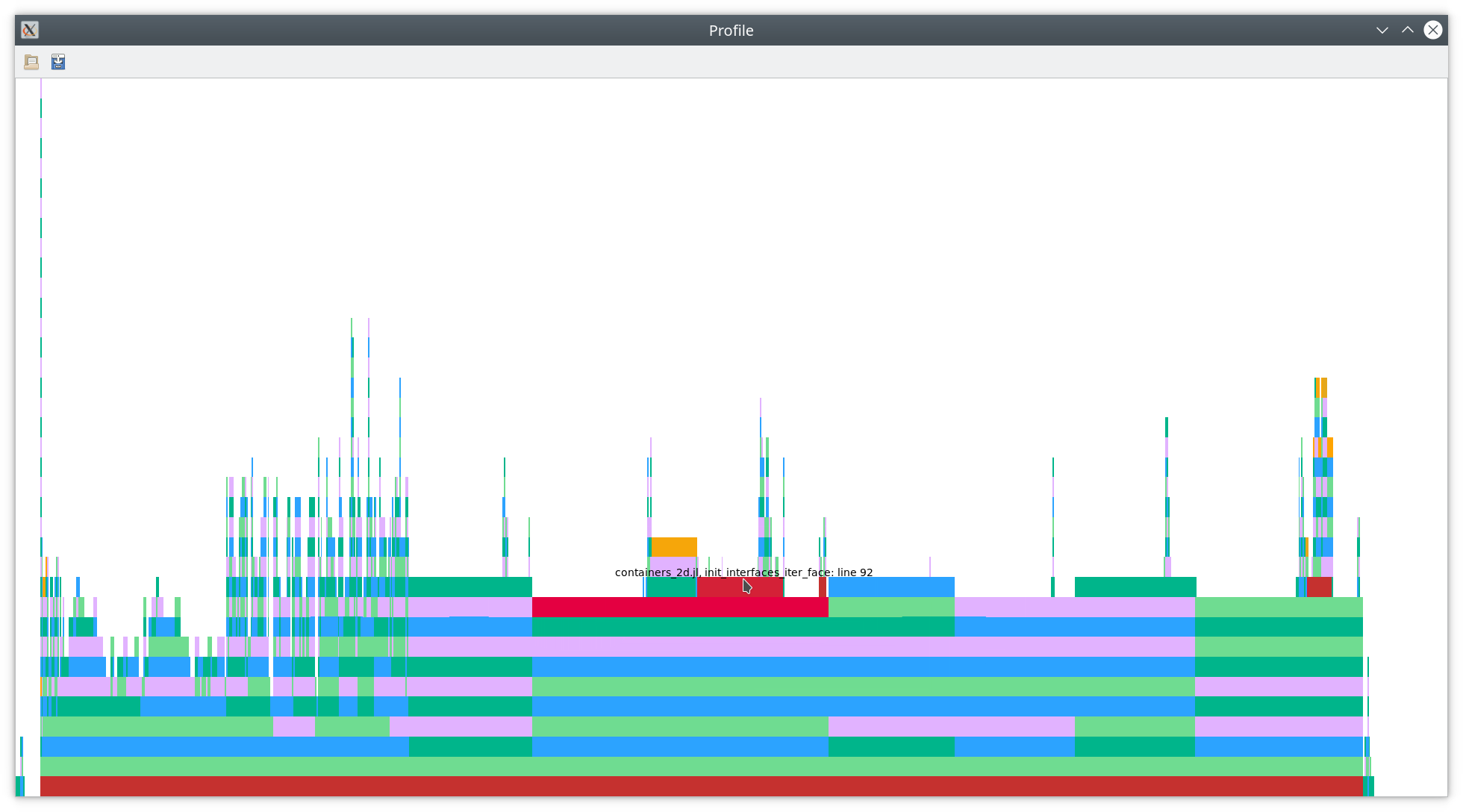
Next, we will dig into init_interfaces!. As you can see in the flamegraph
below, there is a realtively large red part at the top, indicating type
instabilities and dynamic dispatch.
Let’s get some baseline numbers.
julia> @benchmark Trixi.init_interfaces!($(semi.cache.interfaces), $mesh)
samples: 10000; evals/sample: 1; memory estimate: 108.08 KiB; allocs estimate: 2789
ns
(100000.0 - 800000.0] ██████████████████████████████▏9988
(800000.0 - 1.5e6 ] 0
(1.5e6 - 2.2e6 ] 0
(2.2e6 - 2.9e6 ] 0
(2.9e6 - 3.6e6 ] 0
(3.6e6 - 4.3e6 ] 0
(4.3e6 - 5.0e6 ] 0
(5.0e6 - 5.7e6 ] 0
(5.7e6 - 6.4e6 ] 0
(6.4e6 - 7.1e6 ] 0
(7.1e6 - 7.8e6 ] 0
(7.8e6 - 8.5e6 ] 0
(8.5e6 - 9.2e6 ] 0
(9.2e6 - 9.9e6 ] 0
(9.9e6 - 1.06e7 ] ▏12
Counts
min: 119.396 μs (0.00% GC); mean: 135.710 μs (8.85% GC); median: 121.333 μs (0.00% GC); max: 10.552 ms (98.60% GC).
The code yielding the red parts in the flamegraph that we will target now is
# Iterate over all interfaces and extract inner interface data to interface container
# This function will be passed to p4est in init_interfaces! below
function init_interfaces_iter_face(info, user_data)
if info.sides.elem_count != 2
# Not an inner interface
return nothing
end
sides = (load_sc_array(p4est_iter_face_side_t, info.sides, 1),
load_sc_array(p4est_iter_face_side_t, info.sides, 2))
if sides[1].is_hanging == true || sides[2].is_hanging == true
# Mortar, no normal interface
return nothing
end
# Unpack user_data = [interfaces, interface_id, mesh] and increment interface_id
ptr = Ptr{Any}(user_data)
data_array = unsafe_wrap(Array, ptr, 3)
interfaces = data_array[1]
interface_id = data_array[2]
data_array[2] = interface_id + 1
mesh = data_array[3]
# Function barrier because the unpacked user_data above is type-unstable
init_interfaces_iter_face_inner(info, sides, interfaces, interface_id, mesh)
end
This code is much more difficult to optimize since we’re dealing not only with
Julia code but interface the p4est library written in C. Thus, we need to live
with some restrictions and can’t use multiple dispatch for user_data. Instead,
we just get some Ptr{Nothing} and that’s it.
One minor modification we can make is to avoid calling unsafe_wrap(Array, ...),
since this comes with some overhead, both when wrapping the array and when loading
data from it (type instabilities occur since data_array isa Vector{Any}).
Since we’re only loading non-homogeneous items a few times from ptr, we can
use unsafe_load instead.
# Iterate over all interfaces and extract inner interface data to interface container
# This function will be passed to p4est in init_interfaces! below
function init_interfaces_iter_face(info, user_data)
if info.sides.elem_count != 2
# Not an inner interface
return nothing
end
sides = (load_sc_array(p4est_iter_face_side_t, info.sides, 1),
load_sc_array(p4est_iter_face_side_t, info.sides, 2))
if sides[1].is_hanging == true || sides[2].is_hanging == true
# Mortar, no normal interface
return nothing
end
# Unpack user_data = [interfaces, interface_id, mesh] and increment interface_id
ptr = Ptr{Any}(user_data)
interfaces = unsafe_load(ptr, 1)
interface_id = unsafe_load(ptr, 2)
mesh = unsafe_load(ptr, 3)
unsafe_store!(ptr, interface_id + 1, 2)
# Function barrier because the unpacked user_data above is type-unstable
init_interfaces_iter_face_inner(info, sides, interfaces, interface_id, mesh)
end
The performance of this part improved by ca. 10%, yielding a speed-up of
reinitialize_containers! of ca. 4%.
Of course, I also searched for unsafe_wrap in the same file and replaced
similar parts in init_mortars_iter_face and init_boundaries_iter_face
(which are not shown in this post).
julia> @benchmark Trixi.init_interfaces!($(semi.cache.interfaces), $mesh)
samples: 10000; evals/sample: 1; memory estimate: 43.70 KiB; allocs estimate: 1965
ns
(105000.0 - 118000.0] ██████████████████████████████ 7980
(118000.0 - 132000.0] ██▊712
(132000.0 - 145000.0] █262
(145000.0 - 158000.0] ▉201
(158000.0 - 172000.0] ▋150
(172000.0 - 185000.0] ▋136
(185000.0 - 199000.0] ▊180
(199000.0 - 212000.0] ▋163
(212000.0 - 225000.0] ▍91
(225000.0 - 239000.0] ▎48
(239000.0 - 252000.0] ▏30
(252000.0 - 266000.0] ▏20
(266000.0 - 279000.0] ▏11
(279000.0 - 292000.0] ▏6
(292000.0 - 8.416e6 ] ▏10
Counts
min: 104.825 μs (0.00% GC); mean: 123.543 μs (3.10% GC); median: 110.587 μs (0.00% GC); max: 8.416 ms (97.23% GC).
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 7976; evals/sample: 1; memory estimate: 74.30 KiB; allocs estimate: 2340
ns
(603000.0 - 633000.0] ██████████████████████████████▏6758
(633000.0 - 662000.0] ████879
(662000.0 - 691000.0] ▉197
(691000.0 - 721000.0] ▎39
(721000.0 - 750000.0] ▏24
(750000.0 - 779000.0] ▏22
(779000.0 - 808000.0] ▏25
(808000.0 - 838000.0] ▏8
(838000.0 - 867000.0] ▏9
(867000.0 - 896000.0] ▏3
(896000.0 - 925000.0] ▏2
(925000.0 - 955000.0] 0
(955000.0 - 984000.0] ▏2
(984000.0 - 1.1112e7] ▏8
Counts
min: 603.419 μs (0.00% GC); mean: 624.644 μs (1.42% GC); median: 607.376 μs (0.00% GC); max: 11.112 ms (93.67% GC).
Since there are still type instabilities and allocations in init_interfaces!,
there should still be room for further improvements. However, it looks like
these would require further restructuring and more complicated techniques.
We will revisit this part later.
Step 5: Another look at init_elements!
Let’s have another look at init_elements!, the most expensive part we’re
trying to improve.
# Initialize data structures in element container
function init_elements!(elements, mesh::P4estMesh{2}, basis::LobattoLegendreBasis)
@unpack node_coordinates, jacobian_matrix,
contravariant_vectors, inverse_jacobian = elements
calc_node_coordinates!(node_coordinates, mesh, basis.nodes)
for element in 1:ncells(mesh)
calc_jacobian_matrix!(jacobian_matrix, element, node_coordinates, basis)
calc_contravariant_vectors!(contravariant_vectors, element, jacobian_matrix)
calc_inverse_jacobian!(inverse_jacobian, element, jacobian_matrix)
end
return nothing
end
We have already optimized calc_jacobian_matrix! and calc_inverse_jacobian!.
Next, we improve the performance of calc_contravariant_vectors!. Using the
same approach as before, we rewrite broadcasting operations into loops using
@turbo from LoopVectorization.jl, ending up with
# Calculate contravarant vectors, multiplied by the Jacobian determinant J of the transformation mapping.
# Those are called Ja^i in Kopriva's blue book.
function calc_contravariant_vectors!(contravariant_vectors::AbstractArray{<:Any,5}, element, jacobian_matrix)
# The code below is equivalent to the following using broadcasting but much faster.
# # First contravariant vector Ja^1
# @. @views contravariant_vectors[1, 1, :, :, element] = jacobian_matrix[2, 2, :, :, element]
# @. @views contravariant_vectors[2, 1, :, :, element] = -jacobian_matrix[1, 2, :, :, element]
# # Second contravariant vector Ja^2
# @. @views contravariant_vectors[1, 2, :, :, element] = -jacobian_matrix[2, 1, :, :, element]
# @. @views contravariant_vectors[2, 2, :, :, element] = jacobian_matrix[1, 1, :, :, element]
@turbo for j in indices((contravariant_vectors, jacobian_matrix), (4, 4)),
i in indices((contravariant_vectors, jacobian_matrix), (3, 3))
# First contravariant vector Ja^1
contravariant_vectors[1, 1, i, j, element] = jacobian_matrix[2, 2, i, j, element]
contravariant_vectors[2, 1, i, j, element] = -jacobian_matrix[1, 2, i, j, element]
# Second contravariant vector Ja^2
contravariant_vectors[1, 2, i, j, element] = -jacobian_matrix[2, 1, i, j, element]
contravariant_vectors[2, 2, i, j, element] = jacobian_matrix[1, 1, i, j, element]
end
return contravariant_vectors
end
Again, we got a speed-up of ca. 5% for reinitialize_containers!.
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 8406; evals/sample: 1; memory estimate: 66.05 KiB; allocs estimate: 2244
ns
(575000.0 - 600000.0] ██████████████████████████████ 7342
(600000.0 - 624000.0] ███▎768
(624000.0 - 649000.0] ▉188
(649000.0 - 673000.0] ▎42
(673000.0 - 698000.0] ▏23
(698000.0 - 723000.0] ▏9
(723000.0 - 747000.0] ▏5
(747000.0 - 772000.0] ▏6
(772000.0 - 797000.0] ▏4
(797000.0 - 821000.0] ▏2
(821000.0 - 846000.0] ▏1
(846000.0 - 871000.0] ▏4
(871000.0 - 895000.0] ▏2
(895000.0 - 920000.0] ▏1
(920000.0 - 1.0221e7] ▏9
Counts
min: 574.922 μs (0.00% GC); mean: 592.397 μs (1.13% GC); median: 579.274 μs (0.00% GC); max: 10.221 ms (92.91% GC).
By the way, this optimization discovered another bug in LoopVectorization.jl. As always, Chris Elrod was very helpful and fixed the bug quite fast.
Step 6: Passing more information at compile time
Let’s see what we have achieved so far by looking at the current flamegraph.
julia> @profview doit(mesh, equations, solver, semi.cache, 10^4)
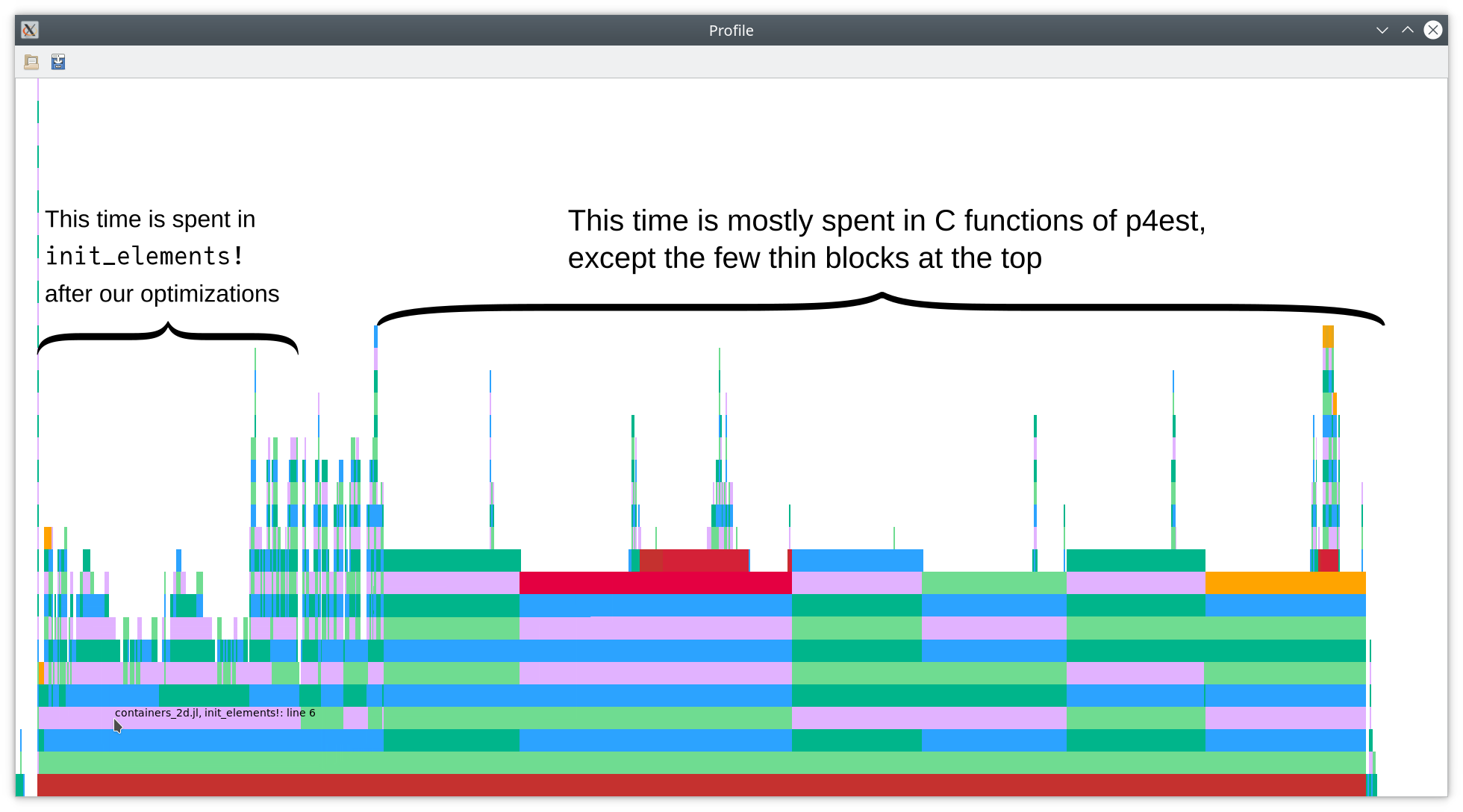
This is already much better than what we had at the beginning: Ca. 70% of the
total time is spent inside p4est functions (p4est_iterate). The only one of
these calls where Julia code takes a significant amount of the time is
init_interfaces_iter_face, which is type-unstable as discussed above.
Nevertheless, there is still more room for improvements of the remaining Julia
code. While LoopVectorization.jl and its code generation capabilities are great,
they can only work with information available to them and need to make some
reasonable heuristics. In particular, they do not know the small sizes of some
arrays such as the polynomial interpolation matrices used in
calc_node_coordinates!. Let’s change that!
First, we need to make sure that the important size information is available
at compile time. Thus, we change the definition of the P4estMesh from
mutable struct P4estMesh{NDIMS, RealT<:Real, NDIMSP2} <: AbstractMesh{NDIMS}
p4est ::Ptr{p4est_t}
# Coordinates at the nodes specified by the tensor product of `nodes` (NDIMS times).
# This specifies the geometry interpolation for each tree.
tree_node_coordinates ::Array{RealT, NDIMSP2} # [dimension, i, j, k, tree]
nodes ::Vector{RealT}
boundary_names ::Array{Symbol, 2} # [face direction, tree]
current_filename ::String
unsaved_changes ::Bool
end
to
mutable struct P4estMesh{NDIMS, RealT<:Real, NDIMSP2, Nodes<:AbstractVector{RealT}} <: AbstractMesh{NDIMS}
p4est ::Ptr{p4est_t}
# Coordinates at the nodes specified by the tensor product of `nodes` (NDIMS times).
# This specifies the geometry interpolation for each tree.
tree_node_coordinates ::Array{RealT, NDIMSP2} # [dimension, i, j, k, tree]
nodes ::Nodes
boundary_names ::Array{Symbol, 2} # [face direction, tree]
current_filename ::String
unsaved_changes ::Bool
end
This allows us to use more general types for the nodes. In particular, we can
use an SVector from StaticArrays.jl.
This SVector (short form of “static vector”) carries some static size information
available at compile time. After changing this type definition, we also need to
adapt the constructors (function P4estMesh(...)) accordingly.
Having done that, let’s make use of the additional static size information
inside calc_node_coordinates!.
# Interpolate tree_node_coordinates to each quadrant
function calc_node_coordinates!(node_coordinates,
mesh::P4estMesh{2},
basis::LobattoLegendreBasis)
# Hanging nodes will cause holes in the mesh if its polydeg is higher
# than the polydeg of the solver.
@assert length(basis.nodes) >= length(mesh.nodes) "The solver can't have a lower polydeg than the mesh"
# We use `StrideArray`s here since these buffers are used in performance-critical
# places and the additional information passed to the compiler makes them faster
# than native `Array`s.
tmp1 = StrideArray(undef, real(mesh),
StaticInt(2), static_length(basis.nodes), static_length(mesh.nodes))
matrix1 = StrideArray(undef, real(mesh),
static_length(basis.nodes), static_length(mesh.nodes))
matrix2 = similar(matrix1)
baryweights_in = barycentric_weights(mesh.nodes)
# Macros from p4est
p4est_root_len = 1 << P4EST_MAXLEVEL
p4est_quadrant_len(l) = 1 << (P4EST_MAXLEVEL - l)
trees = convert_sc_array(p4est_tree_t, mesh.p4est.trees)
for tree in eachindex(trees)
offset = trees[tree].quadrants_offset
quadrants = convert_sc_array(p4est_quadrant_t, trees[tree].quadrants)
for i in eachindex(quadrants)
element = offset + i
quad = quadrants[i]
quad_length = p4est_quadrant_len(quad.level) / p4est_root_len
nodes_out_x = 2 * (quad_length * 1/2 * (basis.nodes .+ 1) .+ quad.x / p4est_root_len) .- 1
nodes_out_y = 2 * (quad_length * 1/2 * (basis.nodes .+ 1) .+ quad.y / p4est_root_len) .- 1
polynomial_interpolation_matrix!(matrix1, mesh.nodes, nodes_out_x, baryweights_in)
polynomial_interpolation_matrix!(matrix2, mesh.nodes, nodes_out_y, baryweights_in)
multiply_dimensionwise!(
view(node_coordinates, :, :, :, element),
matrix1, matrix2,
view(mesh.tree_node_coordinates, :, :, :, tree),
tmp1
)
end
end
return node_coordinates
end
The function static_length is basically the same as length from Base but
returns StaticInts whenver possible. These StaticInts are singletons encoding
the value in their types. Thus, the size information is available at compile
time and can be used to construct StrideArrays
(from StrideArrays.jl)
with statically known size information. This allows LoopVectorization.jl
to use more information and will generally result in better performance.
Be aware that not all other libraries can handle general array types. For
example, HDF5.jl wraps the C library HDF5 and doesn’t work with SVectors.
Thus, we need to change the line
file["nodes"] = mesh.nodes
in function save_mesh_file(mesh::P4estMesh, output_directory, timestep=0) to
file["nodes"] = Vector(mesh.nodes) # the mesh might use custom array types
# to increase the runtime performance
# but HDF5 can only handle plain arrays
We also need to restart Julia since Revise.jl cannot handle redefinitions of types. After running the initialization code again, we get the following benchmark results.
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 8834; evals/sample: 1; memory estimate: 65.86 KiB; allocs estimate: 2244
ns
(547000.0 - 579000.0] ██████████████████████████████ 8078
(579000.0 - 610000.0] ██▌640
(610000.0 - 642000.0] ▍82
(642000.0 - 674000.0] ▏9
(674000.0 - 706000.0] ▏6
(706000.0 - 738000.0] ▏1
(738000.0 - 770000.0] ▏2
(770000.0 - 802000.0] ▏1
(802000.0 - 834000.0] ▏3
(834000.0 - 866000.0] 0
(866000.0 - 898000.0] 0
(898000.0 - 930000.0] ▏1
(930000.0 - 961000.0] 0
(961000.0 - 993000.0] ▏2
(993000.0 - 9.599e6 ] ▏9
Counts
min: 546.681 μs (0.00% GC); mean: 563.582 μs (1.24% GC); median: 550.936 μs (0.00% GC); max: 9.599 ms (94.00% GC).
That’s again a nice improvement of ca. 5%. Of course, this means that the performance
improvement of calc_node_coordinates! is much better than that, since it’s only
one part of reinitialize_containers!.
Step 7: Revisiting the type instability in init_interfaces!
Let’s look again at init_interfaces! and friends. Before trying to improve
anything, let’s record some baseline benchmark results.
julia> @benchmark Trixi.init_interfaces!($(semi.cache.interfaces), $mesh)
samples: 10000; evals/sample: 1; memory estimate: 43.70 KiB; allocs estimate: 1965
ns
(103500.0 - 110600.0] ██████████████████████████████ 8596
(110600.0 - 117600.0] ███▎904
(117600.0 - 124600.0] █▏298
(124600.0 - 131700.0] ▏13
(131700.0 - 138700.0] ▌123
(138700.0 - 145700.0] ▏21
(145700.0 - 152800.0] ▏12
(152800.0 - 159800.0] ▏3
(159800.0 - 166900.0] ▏8
(166900.0 - 173900.0] ▏3
(173900.0 - 180900.0] ▏5
(180900.0 - 188000.0] 0
(188000.0 - 195000.0] ▏3
(195000.0 - 202000.0] ▏1
(202000.0 - 6.7555e6] ▏10
Counts
min: 103.534 μs (0.00% GC); mean: 110.756 μs (2.91% GC); median: 105.495 μs (0.00% GC); max: 6.756 ms (98.20% GC).
As we have seen in the flamegraphs above, a significant amount of runtime is
caused by type instabilities and dynamic dispatch since we do not know the
exact types of interfaces and mesh, which are passed from C as Ptr{Nothing}.
However, we can reduce the cost of this type instability a bit by wrapping
everything in a mutable struct instead of an array. Thus, we create a new type
# A helper struct used in
# - init_interfaces_iter_face
# - init_boundaries_iter_face
# - init_mortars_iter_face
# below.
mutable struct InitSurfacesIterFaceUserData{Surfaces, Mesh}
surfaces ::Surfaces
surface_id::Int
mesh ::Mesh
end
We chose the name InitSurfacesIterFaceUserData since it will also be used
for the other init_*_iter_face functions.
Next, we change init_interfaces_iter_face to
function init_interfaces_iter_face(info, user_data)
if info.sides.elem_count != 2
# Not an inner interface
return nothing
end
sides = (load_sc_array(p4est_iter_face_side_t, info.sides, 1),
load_sc_array(p4est_iter_face_side_t, info.sides, 2))
if sides[1].is_hanging == true || sides[2].is_hanging == true
# Mortar, no normal interface
return nothing
end
# Unpack user_data = [interfaces, interface_id, mesh]
_user_data = unsafe_pointer_to_objref(Ptr{InitSurfacesIterFaceUserData}(user_data))
# Function barrier because the unpacked user_data above is type-unstable
init_interfaces_iter_face_inner(info, sides, _user_data)
end
Of course, we also need to adapt the first few lines of
init_interfaces_iter_face_inner accordingly.
# Function barrier for type stability
function init_interfaces_iter_face_inner(info, sides, user_data)
interfaces = user_data.surfaces
interface_id = user_data.surface_id
mesh = user_data.mesh
user_data.surface_id += 1
# remaining code as before
We also change the way user_data is created in init_interfaces! from
user_data = [interfaces, 1, mesh]
to
user_data = InitSurfacesIterFaceUserData(interfaces, 1, mesh)
Finally, we also modify iterate_faces to work with non-array arguments user_data:
function iterate_faces(mesh::P4estMesh, iter_face_c, user_data)
if user_data isa AbstractArray
user_data_ptr = pointer(user_data)
else
user_data_ptr = pointer_from_objref(user_data)
end
GC.@preserve user_data begin
p4est_iterate(mesh.p4est,
C_NULL, # ghost layer
user_data_ptr,
C_NULL, # iter_volume
iter_face_c, # iter_face
C_NULL) # iter_corner
end
return nothing
end
Let’s see what we have achieved:
julia> @benchmark Trixi.init_interfaces!($(semi.cache.interfaces), $mesh)
samples: 10000; evals/sample: 1; memory estimate: 38.66 KiB; allocs estimate: 1649
ns
(91200.0 - 96800.0 ] ██████████████████████████████ 8613
(96800.0 - 102400.0] ██▋738
(102400.0 - 107900.0] █▌401
(107900.0 - 113500.0] ▎40
(113500.0 - 119100.0] ▏18
(119100.0 - 124700.0] ▍103
(124700.0 - 130200.0] ▏19
(130200.0 - 135800.0] ▏13
(135800.0 - 141400.0] ▏15
(141400.0 - 146900.0] ▏3
(146900.0 - 152500.0] ▏11
(152500.0 - 158100.0] ▏10
(158100.0 - 163700.0] ▏2
(163700.0 - 169200.0] ▏4
(169200.0 - 8.4395e6] ▏10
Counts
min: 91.216 μs (0.00% GC); mean: 97.745 μs (3.22% GC); median: 92.552 μs (0.00% GC); max: 8.439 ms (98.72% GC).
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 9064; evals/sample: 1; memory estimate: 60.81 KiB; allocs estimate: 1928
ns
(533000.0 - 553000.0] ██████████████████████████████ 7993
(553000.0 - 572000.0] ██▉750
(572000.0 - 591000.0] ▋136
(591000.0 - 611000.0] ▌112
(611000.0 - 630000.0] ▏17
(630000.0 - 650000.0] ▏12
(650000.0 - 669000.0] ▏19
(669000.0 - 688000.0] ▏5
(688000.0 - 708000.0] ▏4
(708000.0 - 727000.0] ▏1
(727000.0 - 747000.0] ▏1
(747000.0 - 766000.0] ▏2
(766000.0 - 785000.0] ▏1
(785000.0 - 805000.0] ▏1
(805000.0 - 1.1446e7] ▏10
Counts
min: 533.138 μs (0.00% GC); mean: 549.285 μs (1.29% GC); median: 536.976 μs (0.00% GC); max: 11.446 ms (94.12% GC).
A bit more than 10% improvement of init_interfaces!, resulting in ca. 3% speed-up
of reinitialize_containers!. I also changed the functions for the boundaries
and mortars, but these do not play a role here since there are no boundaries
or mortars in this fully-periodic and conforming mesh.
Step 8: Further algorithmic improvements
Let’s have a look at the flamegraph again.
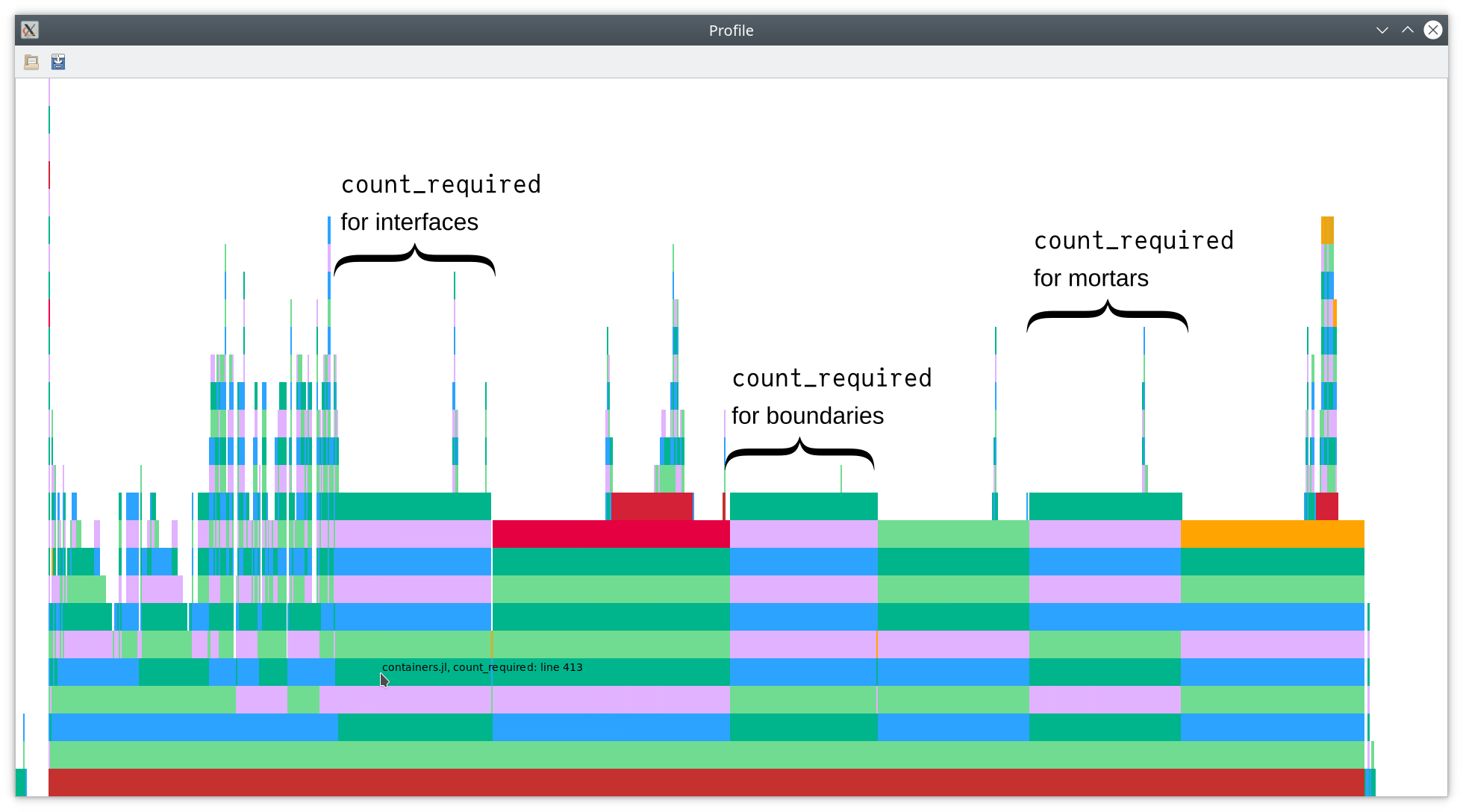
Further inspection shows that a considerable amount of time is spent inside of
count_required. Indeed, this function is called three times to count the
required number of interfaces, boundaries, and mortars. Since most time is spent
inside C (which we cannot analyze further here using the tools we have so far),
it appears to be useful to merge these three functions into a single function
performing all counting operations. Thus, we will save the cost of iterating
over the p4est mesh several times. Hence, we create the combined function
# Iterate over all interfaces and count
# - (inner) interfaces
# - mortars
# - boundaries
# and collect the numbers in `user_data` in this order.
function count_surfaces_iter_face(info, user_data)
if info.sides.elem_count == 2
# Two neighboring elements => Interface or mortar
# Extract surface data
sides = (load_sc_array(p4est_iter_face_side_t, info.sides, 1),
load_sc_array(p4est_iter_face_side_t, info.sides, 2))
if sides[1].is_hanging == 0 && sides[2].is_hanging == 0
# No hanging nodes => normal interface
# Unpack user_data = [interface_count] and increment interface_count
ptr = Ptr{Int}(user_data)
id = unsafe_load(ptr, 1)
unsafe_store!(ptr, id + 1, 1)
else
# Hanging nodes => mortar
# Unpack user_data = [mortar_count] and increment mortar_count
ptr = Ptr{Int}(user_data)
id = unsafe_load(ptr, 2)
unsafe_store!(ptr, id + 1, 2)
end
elseif info.sides.elem_count == 1
# One neighboring elements => Boundary
# Unpack user_data = [boundary_count] and increment boundary_count
ptr = Ptr{Int}(user_data)
id = unsafe_load(ptr, 3)
unsafe_store!(ptr, id + 1, 3)
end
return nothing
end
function count_required_surfaces(mesh::P4estMesh)
# Let p4est iterate over all interfaces and call count_surfaces_iter_face
iter_face_c = @cfunction(count_surfaces_iter_face, Cvoid, (Ptr{p4est_iter_face_info_t}, Ptr{Cvoid}))
# interfaces, mortars, boundaries
user_data = [0, 0, 0]
iterate_faces(mesh, iter_face_c, user_data)
# Return counters
return (interfaces = user_data[1],
mortars = user_data[2],
boundaries = user_data[3])
end
and modify reinitialize_containers! to
function reinitialize_containers!(mesh::P4estMesh, equations, dg::DGSEM, cache)
# Re-initialize elements container
@unpack elements = cache
resize!(elements, ncells(mesh))
init_elements!(elements, mesh, dg.basis)
required = count_required_surfaces(mesh)
# re-initialize interfaces container
@unpack interfaces = cache
resize!(interfaces, required.interfaces)
init_interfaces!(interfaces, mesh)
# re-initialize boundaries container
@unpack boundaries = cache
resize!(boundaries, required.boundaries)
init_boundaries!(boundaries, mesh)
# re-initialize mortars container
@unpack mortars = cache
resize!(mortars, required.mortars)
init_mortars!(mortars, mesh)
end
Let’s see what we get from this.
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 10000; evals/sample: 1; memory estimate: 60.36 KiB; allocs estimate: 1922
ns
(403000.0 - 419000.0] ██████████████████████████████ 8931
(419000.0 - 435000.0] █▊499
(435000.0 - 451000.0] █▎369
(451000.0 - 467000.0] ▌118
(467000.0 - 483000.0] ▎38
(483000.0 - 499000.0] ▏13
(499000.0 - 515000.0] ▏8
(515000.0 - 531000.0] ▏9
(531000.0 - 547000.0] ▏1
(547000.0 - 563000.0] ▏2
(563000.0 - 578000.0] 0
(578000.0 - 594000.0] ▏1
(594000.0 - 610000.0] 0
(610000.0 - 626000.0] ▏1
(626000.0 - 1.1291e7] ▏10
Counts
min: 402.560 μs (0.00% GC); mean: 417.274 μs (1.78% GC); median: 405.770 μs (0.00% GC); max: 11.291 ms (95.63% GC).
That’s a nice speed-up of ca. 25%!
Step 9: Capitalizing on what we have learned
We have seen that there is some overhead of iterating over the mesh several times. Thus, we could reduce the runtime by reducing the number of mesh iterations for counting the required numbers of interfaces, mortars, and boundaries. Well, let’s do the same for the initialization step that comes next!
Instead of calling init_interfaces!, init_mortars!, and init_boundaries!
separately in reinitialize_containers!, we will create a function
init_surfaces! that fuses these three iterations over the mesh in p4est.
function reinitialize_containers!(mesh::P4estMesh, equations, dg::DGSEM, cache)
# Re-initialize elements container
@unpack elements = cache
resize!(elements, ncells(mesh))
init_elements!(elements, mesh, dg.basis)
required = count_required_surfaces(mesh)
# resize interfaces container
@unpack interfaces = cache
resize!(interfaces, required.interfaces)
# resize boundaries container
@unpack boundaries = cache
resize!(boundaries, required.boundaries)
# resize mortars container
@unpack mortars = cache
resize!(mortars, required.mortars)
# re-initialize containers together to reduce
# the number of iterations over the mesh in
# p4est
init_surfaces!(interfaces, mortars, boundaries, mesh)
end
First, we need to create a new struct that will hold our user data.
# A helper struct used in initialization methods below
mutable struct InitSurfacesIterFaceUserData{Interfaces, Mortars, Boundaries, Mesh}
interfaces ::Interfaces
interface_id::Int
mortars ::Mortars
mortar_id ::Int
boundaries ::Boundaries
boundary_id ::Int
mesh ::Mesh
end
function InitSurfacesIterFaceUserData(interfaces, mortars, boundaries, mesh)
return InitSurfacesIterFaceUserData{
typeof(interfaces), typeof(mortars), typeof(boundaries), typeof(mesh)}(
interfaces, 1, mortars, 1, boundaries, 1, mesh)
end
Here, we have also written a convenience constructor initializing the counters for the different surface types to unity.
Next, we write a single function that will perform the initialization of all three different surface types together.
function init_surfaces_iter_face(info, user_data)
# Unpack user_data
data = unsafe_pointer_to_objref(Ptr{InitSurfacesIterFaceUserData}(user_data))
# Function barrier because the unpacked user_data above is type-unstable
init_surfaces_iter_face_inner(info, data)
end
# Function barrier for type stability
function init_surfaces_iter_face_inner(info, user_data)
@unpack interfaces, mortars, boundaries = user_data
if info.sides.elem_count == 2
# Two neighboring elements => Interface or mortar
# Extract surface data
sides = (load_sc_array(p4est_iter_face_side_t, info.sides, 1),
load_sc_array(p4est_iter_face_side_t, info.sides, 2))
if sides[1].is_hanging == 0 && sides[2].is_hanging == 0
# No hanging nodes => normal interface
if interfaces !== nothing
init_interfaces_iter_face_inner(info, sides, user_data)
end
else
# Hanging nodes => mortar
if mortars !== nothing
init_mortars_iter_face_inner(info, sides, user_data)
end
end
elseif info.sides.elem_count == 1
# One neighboring elements => boundary
if boundaries !== nothing
init_boundaries_iter_face_inner(info, user_data)
end
end
return nothing
end
function init_surfaces!(interfaces, mortars, boundaries, mesh::P4estMesh)
# Let p4est iterate over all interfaces and call init_surfaces_iter_face
iter_face_c = @cfunction(init_surfaces_iter_face,
Cvoid, (Ptr{p4est_iter_face_info_t}, Ptr{Cvoid}))
user_data = InitSurfacesIterFaceUserData(
interfaces, mortars, boundaries, mesh)
iterate_faces(mesh, iter_face_c, user_data)
return interfaces
end
This follows basically the same logic as count_surfaces_iter_face above
to decide which type of surface we have to deal with. Note that we added
some check of the form if interfaces !== nothing. These will allow us
to pass interfaces = nothing in InitSurfacesIterFaceUserData to mimic
what we had before in init_interfaces!, e.g.
function init_interfaces!(interfaces, mesh::P4estMesh)
# Let p4est iterate over all interfaces and call init_surfaces_iter_face
iter_face_c = @cfunction(init_surfaces_iter_face,
Cvoid, (Ptr{p4est_iter_face_info_t}, Ptr{Cvoid}))
user_data = InitSurfacesIterFaceUserData(
interfaces,
nothing, # mortars
nothing, # boundaries
mesh)
iterate_faces(mesh, iter_face_c, user_data)
return interfaces
end
Finally, we need to change the first few lines of the inner initialization
functions to account for the new type of user_data, e.g.
function init_interfaces_iter_face_inner(info, sides, user_data)
@unpack interfaces, interface_id, mesh = user_data
user_data.interface_id += 1
# remaining part as before
That’s it. Let’s see how the new version performs.
julia> @benchmark Trixi.reinitialize_containers!($mesh, $equations, $solver, $(semi.cache))
samples: 10000; evals/sample: 1; memory estimate: 33.08 KiB; allocs estimate: 1048
ns
(272000.0 - 297000.0] ██████████████████████████████ 9290
(297000.0 - 322000.0] █▋465
(322000.0 - 347000.0] ▍88
(347000.0 - 373000.0] ▏26
(373000.0 - 398000.0] ▏14
(398000.0 - 423000.0] ▏5
(423000.0 - 448000.0] ▏5
(448000.0 - 473000.0] ▏4
(473000.0 - 499000.0] ▏2
(499000.0 - 524000.0] ▏5
(524000.0 - 549000.0] ▏23
(549000.0 - 574000.0] ▎53
(574000.0 - 599000.0] ▏4
(599000.0 - 624000.0] ▏6
(624000.0 - 9.027e6 ] ▏10
Counts
min: 271.808 μs (0.00% GC); mean: 284.722 μs (1.20% GC); median: 275.231 μs (0.00% GC); max: 9.027 ms (96.83% GC).
That’s a nice speed-up of ca. one third!
Summary and conclusions
Let’s compare our final result with the initial state.
julia> trixi_include(joinpath(examples_dir(), "2d", "elixir_advection_amr.jl"),
mesh=P4estMesh((1, 1), polydeg=3,
coordinates_min=coordinates_min, coordinates_max=coordinates_max,
initial_refinement_level=4))
[...]
────────────────────────────────────────────────────────────────────────────────────
Trixi.jl Time Allocations
────────────────────── ───────────────────────
Tot / % measured: 485ms / 98.3% 82.3MiB / 100%
Section ncalls time %tot avg alloc %tot avg
────────────────────────────────────────────────────────────────────────────────────
rhs! 1.61k 208ms 43.7% 130μs 53.5MiB 65.2% 34.1KiB
[...]
AMR 64 72.8ms 15.3% 1.14ms 25.8MiB 31.4% 412KiB
refine 64 32.1ms 6.75% 502μs 5.95MiB 7.24% 95.1KiB
solver 64 20.5ms 4.31% 321μs 5.44MiB 6.63% 87.1KiB
mesh 64 11.6ms 2.43% 181μs 515KiB 0.61% 8.05KiB
rebalance 128 10.6ms 2.22% 82.7μs 2.00KiB 0.00% 16.0B
refine 64 547μs 0.11% 8.55μs 0.00B 0.00% 0.00B
~mesh~ 64 452μs 0.09% 7.07μs 513KiB 0.61% 8.02KiB
~refine~ 64 26.9μs 0.01% 421ns 1.66KiB 0.00% 26.5B
coarsen 64 31.4ms 6.59% 490μs 7.36MiB 8.97% 118KiB
solver 64 19.7ms 4.13% 308μs 5.55MiB 6.76% 88.8KiB
mesh 64 11.7ms 2.45% 182μs 1.81MiB 2.21% 29.0KiB
rebalance 128 10.1ms 2.12% 79.0μs 2.00KiB 0.00% 16.0B
~mesh~ 64 1.06ms 0.22% 16.5μs 1.29MiB 1.57% 20.6KiB
coarsen! 64 489μs 0.10% 7.65μs 534KiB 0.63% 8.34KiB
~coarsen~ 64 30.0μs 0.01% 469ns 1.66KiB 0.00% 26.5B
indicator 64 9.05ms 1.90% 141μs 12.4MiB 15.2% 199KiB
~AMR~ 64 201μs 0.04% 3.14μs 2.48KiB 0.00% 39.8B
[...]
For comparison, here are the numbers we had at the beginning.
[...]
AMR 64 213ms 31.2% 3.33ms 121MiB 67.7% 1.89MiB
coarsen 64 110ms 16.2% 1.72ms 53.9MiB 30.1% 862KiB
solver 64 97.4ms 14.3% 1.52ms 52.1MiB 29.1% 833KiB
mesh 64 12.9ms 1.90% 202μs 1.81MiB 1.01% 29.0KiB
rebalance 128 11.2ms 1.64% 87.3μs 2.00KiB 0.00% 16.0B
~mesh~ 64 1.18ms 0.17% 18.4μs 1.29MiB 0.72% 20.6KiB
coarsen! 64 590μs 0.09% 9.22μs 534KiB 0.29% 8.34KiB
~coarsen~ 64 39.0μs 0.01% 609ns 1.66KiB 0.00% 26.5B
refine 64 91.8ms 13.4% 1.43ms 54.7MiB 30.6% 875KiB
solver 64 79.3ms 11.6% 1.24ms 54.2MiB 30.3% 867KiB
mesh 64 12.5ms 1.83% 195μs 515KiB 0.28% 8.05KiB
rebalance 128 11.4ms 1.67% 88.9μs 2.00KiB 0.00% 16.0B
refine 64 613μs 0.09% 9.58μs 0.00B 0.00% 0.00B
~mesh~ 64 476μs 0.07% 7.44μs 513KiB 0.28% 8.02KiB
~refine~ 64 36.6μs 0.01% 572ns 1.66KiB 0.00% 26.5B
indicator 64 10.8ms 1.58% 168μs 12.4MiB 6.96% 199KiB
~AMR~ 64 252μs 0.04% 3.94μs 2.48KiB 0.00% 39.8B
[...]
Thus, we could reduce the runtime spend in AMR routines by ca. two thirds in total. Citing Erik Faulhaber from Issue #627:
rhs!is expected to be slower since P4estMesh is treated as a curved mesh. AMR is also expected to be slower because the curved data structures that need to be rebuilt are a lot more complex than the ones used byTreeMesh. However, AMR withP4estMeshcan most likely be optimized to be at least twice as fast as it is now.
It looks like he was completely right. We even got a better speed-up of 3x instead of 2x he set as goal for us!
Let’s recapitulate some lessons that we learned.
- Profiling is an important tool to gather knowledge about the problem. Without it, we do not know which parts of our code are expensive and might optimize code that is totally irrelevant.
- Having CI tests is absolutely necesary for making sure that refactoring code doesn’t break anything and detecting possible bugs.
- We used two types of optimizations:
- Algorithmic improvements such as reducing the number of iterations over the p4est mesh
- Low-lever performance improvements such as rewriting broadcasting operations
on
views into loops annotated with@turbo
Algorithmic optimizations are often harder to detect since a broader overview over the problem is necessary. However, they often provide better opportunities for improving the performance than low-lever optimizations.
- LoopVectorization.jl is a great package to improve the performance of CPU code in Julia. However, you need to know what you are doing and might run into interesting bugs. Luckily, Chris Elrod, the developer of LoopVectorization.jl, is really nice and helpful. In my experience, he will fix bugs quite fast when you report them on GitHub and provide minimal working examples (MWEs).
- Providing generic Julia code as callback via C can be tricky and we still have some type instabilities left for the future. We could fix them by passing Julia closures to C, but that’s not supported on all platforms such as ARM. Since there are ARM clusters, using this feature is not an option for us in Trixi.jl. Thus, we need to do something else to fix the type instabilities visible as red blocks at the top of the final flamegraph below.
That’s it for today! I hope you enjoyed this blog post and could learn something. Feel free to get into contact if you liked this and, say, want to contribute to Trixi.jl.
As all code published in this blog, new code developed here is released under the terms of the MIT license. Code excerpts of Trixi.jl are subject to the MIT license distributed with Trixi.